
AutoDok Autonome Unfalldokumentation
01.07.2021
Motivation und Ziele
Ziel des Projektes AutoDok ist die Entwicklung einer luftbasierten Lösung zur automatisierten polizeilichen Verkehrsunfallaufnahme, die insbesondere bei schweren Verkehrsunfällen wie Massenkarambolagen polizeiliche Einsatzkräfte bei der Dokumentation und Beweissicherung unterstützen soll. Ziel ist es, dass die Straßen möglichst schnell wieder freigegeben werden können, so dass die Gefahr von Folgeunfällen reduziert wird. Dies trägt zur Erhöhung der Sicherheit der Bürgerinnen und Bürger bei und auch der Einsatzkräfte vor Ort bei. Das geplante System soll einem vollständig integrierten Ansatz folgen, d.h. alle nötigen Subsysteme, wie UAV, Bodenstation, Verarbeitung und Speicherung werden in einer mobilen Einheit, einem speziell ausgestattetem Unfallaufnahme- und Dokumentationsfahrzeug, integriert. Dadurch werden zum einen Feldversuche bei realen Szenarien erleichtert, zum anderen können Herausforderungen und Probleme eines Gesamtsystems erkannt und schon in der vorkommerziellen Phase adressiert werden.
Das in AutoDok entwickelte System soll einen Funktionsdemonstrator darstellen, der möglichst einfach in realen Einsätzen zur Unfalldokumentation eingesetzt werden kann. Durch automatisch berechnete Flugmuster soll sie autonom das, zuvor vom Operator definierte, Einsatzgebiet in einem speziellen Muster abfliegen. Im Leitstand werden aus den Sensorin-formationen 3D-Modelle und maßstabsgetreue Orthophotos des Unfallgebietes erstellt und für die weitere Bearbeitung gespeichert.
Ergebnisse
Demonstrator Drohne und Fahrzeug


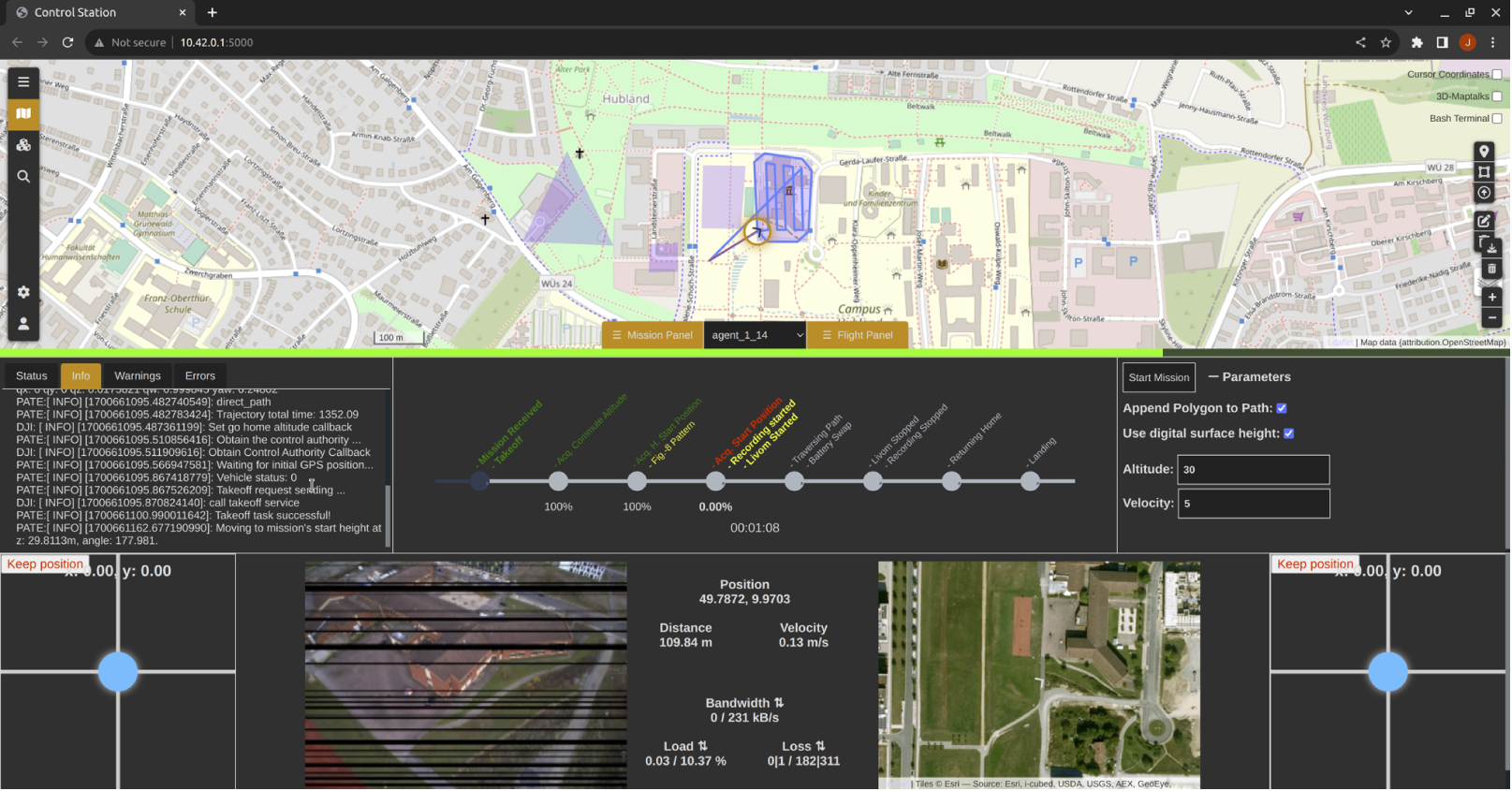
Eine einfache und intuitive Bedienung des Systems erfolgt durch die im Fahrzeug integrierte Bodenkontrollstation. Technisch besteht sie aus mehreren Monitoren, einem leistungsfähigen PC-System und der Kommunikationstechnik zum Drohnensystem. Die zugehörige Software ermöglicht die Planung und Überwachung von Aufnahme und Flug vor Ort. Bereits während des Fluges werden die Daten übertragen und zu einem 3D-Modell verarbeitet, so dass unmittelbar ein umfassender Lageüberblick zur Verfügung steht.


Das Drohnensystem baut auf eine M300-Drohe der Firma DJI auf – erweitert mit einem Sensorsystem mit 3D-Laserscanner, Kamerasystemen, einen Onboard-Computer, sowie Komponenten zur Spannungsversorgung und Kommunikation. Durch die integrierte Drohnensteuerung kann die komplette Mission vom Abheben, über die Datenaufnahme bis zum Landen autonom erfolgen. Fernbedienungseingaben werden kollaborativ im weiterlaufendem autonomen Flug berücksichtigt, z.B. um kleine Korrekturen durchzuführen. Natürlich kann die Drohnenkontrolle über die Fernbedienung weiterhin auch komplett übernommen werden, so dass jederzeit im vollem Umfang manuell eingegriffen werden kann.
Bodenstation und Kommunikation
Zur Kommunikation wurde ein speziell angepasstes LongRange-Wifi verwendet, welches durch Anpassung der Treiber auf Verwendung des 5Ghz Bandes hin erweitert wurde. So wird eine maximale Reichweite von 1500m (2,4GHz) bzw. 600m (50Ghz) bei einer Datenrate von 1MBit/s erreicht.


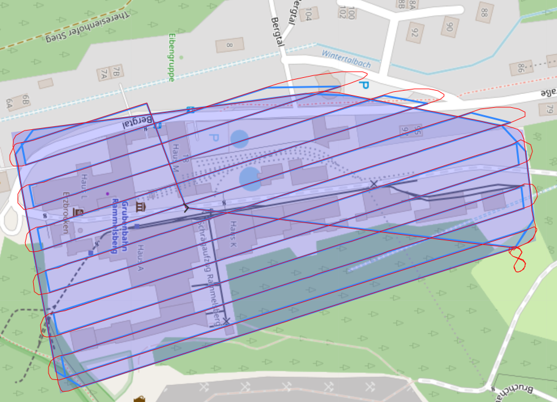
Die Bodenstation zur Missionsplanung und Überwachung der Ausführung ermöglicht eine einfache Bedienung des Drohnensystems. Sie erlaubt eine interaktive Auswahl des Zielgebietes, berechnet automatisch optimierte Flugpläne und koordiniert die Durchführung der Operation. Der Operator kann den Status der Drohne jederzeit nachvollziehen und eingreifen. Hierbei werden Parameter, Informationen und Zwangsbedingungen wie Sensorabdeckung, Höhenkarten, Mehrfachflächen, Sperrgebiete, Geofences u.v.m. berücksichtigt.
Autonomer Flug
Die Qualität von Aufnahmedaten und Positionsbestimmung ist stets anfällig für schlagartige Änderungen im Bewegungsverlauf. Idealerweise bewegt sich die Drohne mit kontinuierlicher Geschwindigkeit vorwärts und durchführt Orientierungsänderungen auf kontinuierlichen, möglichst glatten Kurven. Hierfür wurde die Pfadplanungs- und Flugsteuerungssoftware PATE (Path-Oriented Arial Trajectory Execution) entwickelt. Durch Erzeugung und Optimierung polynomialer Flugbahnen aus den Wegpunkten der Flugplanung und dynamischer Erstellung und Ausführung ruckfreier Joystick-Kommandos zur Steuerung der Drohne. Zusätzlich unterstützt es die Einhaltung der Höhe über Grund mittels LiDAR-Daten, das Ausweichen einfacher Hindernisse und die Neuplanung bei ausgedehnten Hindernissen.
Durch die integrierte Drohnensteuerung kann die komplette Mission vom Abheben, über die Datenaufnahme bis zum Landen autonom erfolgen. Fernbedienungseingaben werden kollaborativ im weiterlaufenden autonomen Flug berücksichtigt, z.B. um kleine Korrekturen durchzuführen. Natürlich kann die Drohnenkontrolle über die Fernbedienung weiterhin auch komplett übernommen werden, so dass jederzeit im vollen Umfang manuell eingegriffen werden kann.
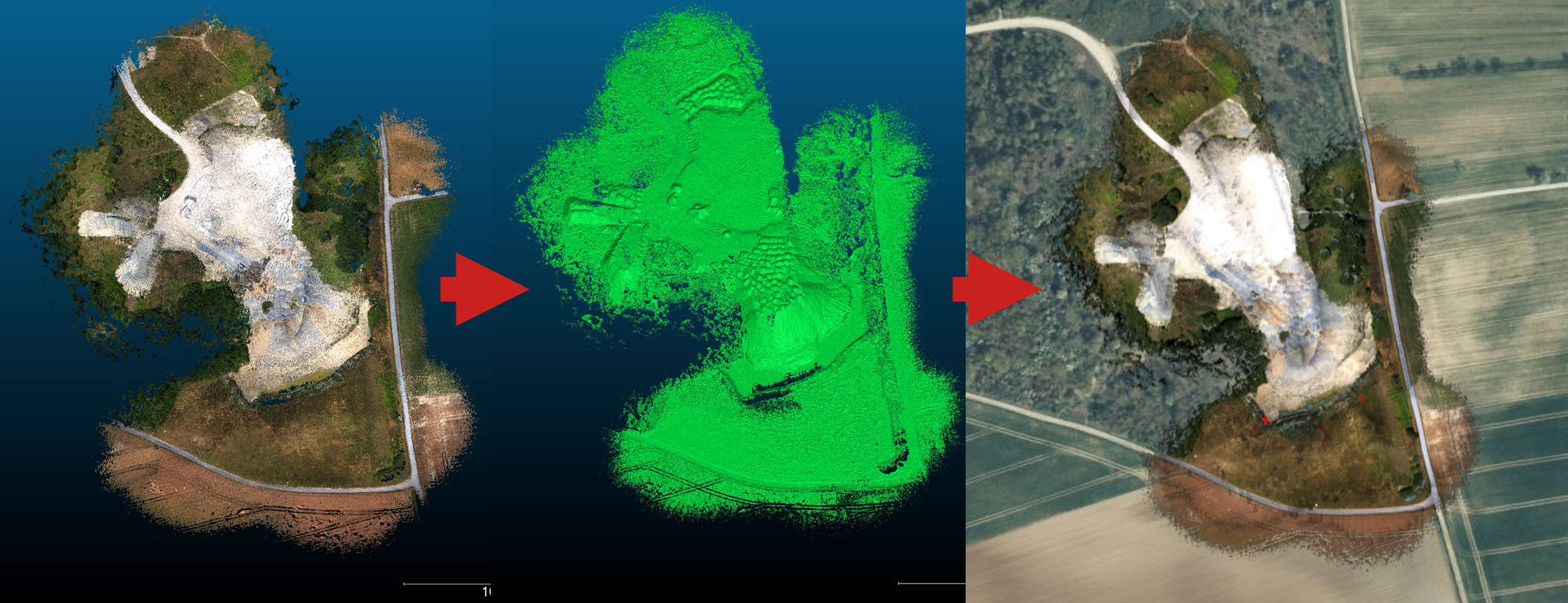
3D Modelierung und Orthophotos
Zur Registrierung der Punktwolken des LIDAR wurde ein angepasster LiVOM-Algorithmus (LIDAR-Inertial-Visual Odometry and Mapping) verwendet. Zudem wurden verschiedene Kalibierungsmethoden für Kamera und LIDAR entwickkelt und umgesetzt.
Rohdaten registrierte Punktwolke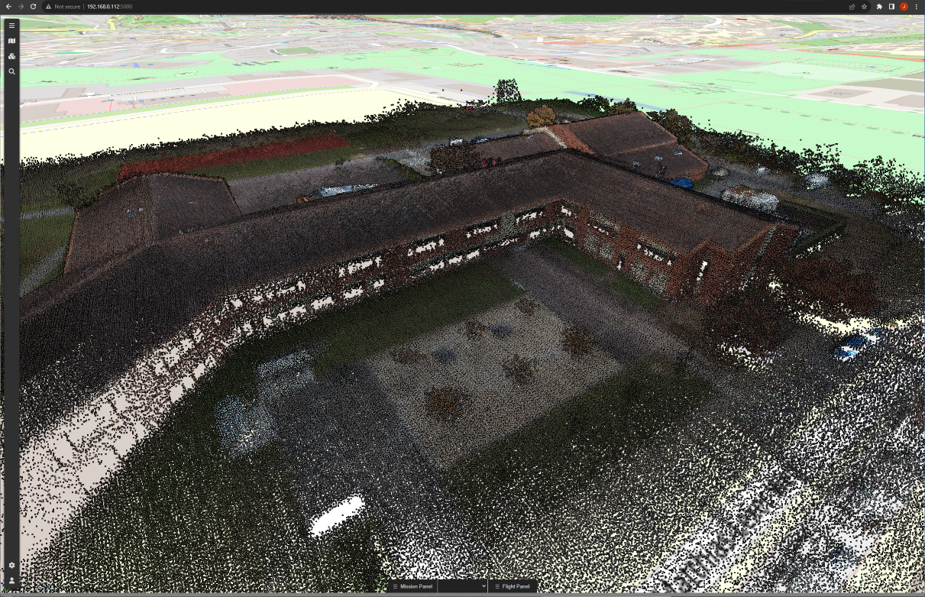
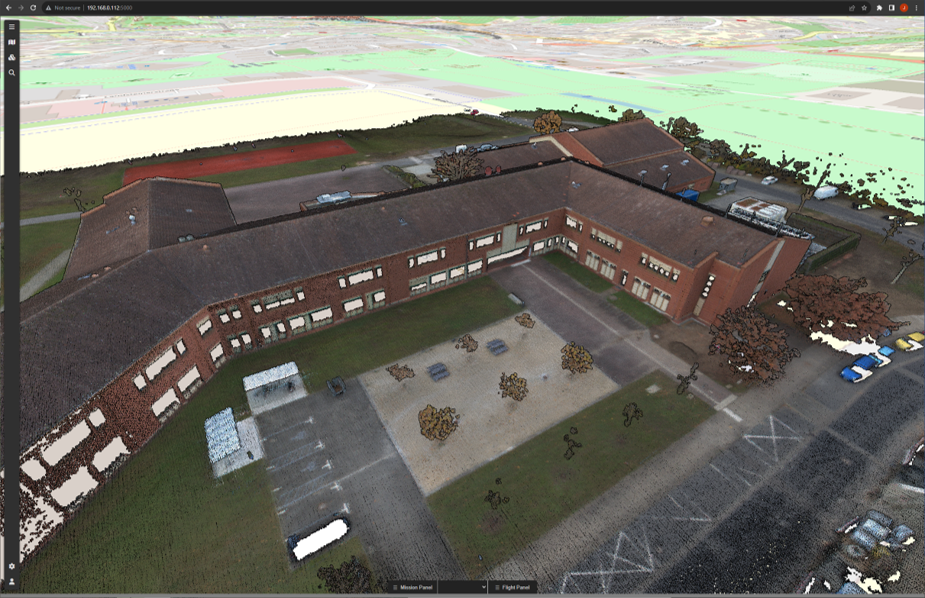
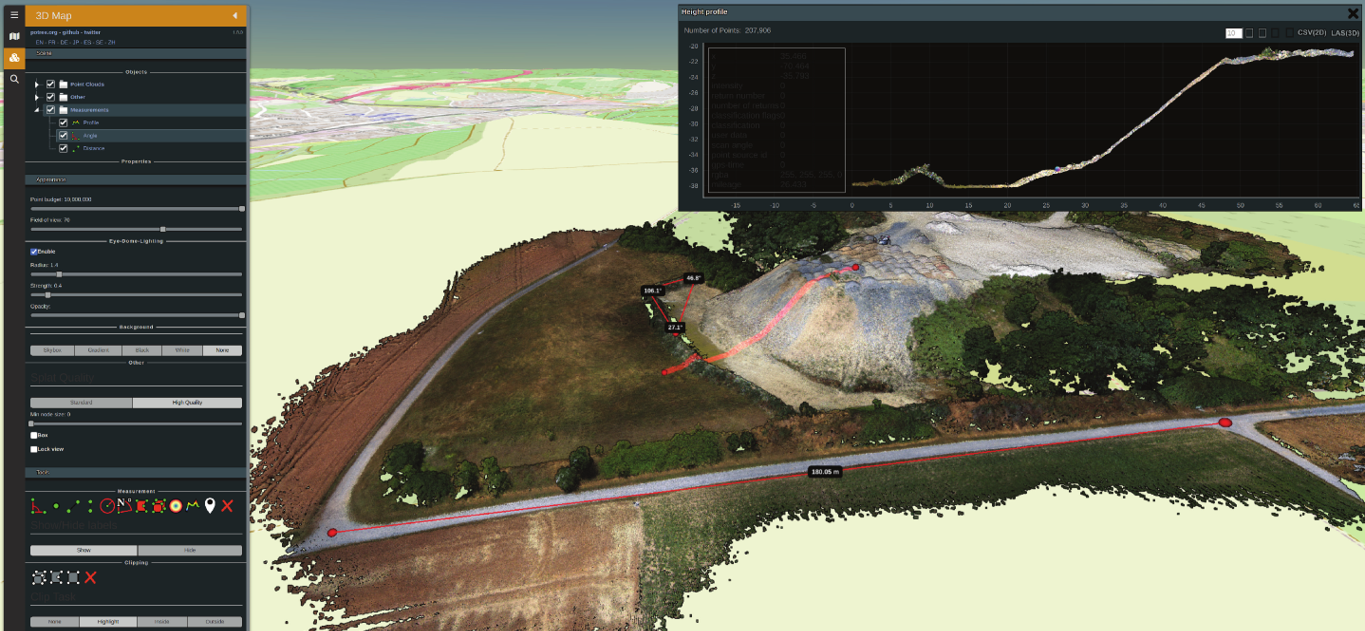
Zur Erstellung von Orthophotos wurde eine Pipeline entwickelt, die aus den registrierten Punktwolken zuerst ein Mesh erzeugt und aus diesem dann ein Orthophoto rendert, welches schließlich ebenfalls geolokalisiert (mit wählbarem Level-of-Detail) in die Bodenstation eingebunden wird.
Laufzeit
7/2021 – 12/2023
Konsortium
- Zentrum für Telematik e.V., Würzburg
- Hensel Fahrzeugbau GmbH & Co. KG, Saarbrücken, Waldbrunn
- Polizeidirektion Lüneburg
Förderung
Dieses Projekt wird Rahmen des Programms Forschung für die zivile Sicherheit vom Bundesministerium für Bildung und Forschung gefördert.
Bekanntmachung: “Anwender - Innovativ: Forschung für die zivile Sicherheit II”
Kontakt
E-Mail: 
Magdalene-Schoch-Str. 5
97074 Würzburg - Germany
Daniel Eck (Geschäftsführer)
Telefon: +49 (0)931 615 633-10
Fax: +49 (0)931 615 633-11
E-Mail: info(at)telematik-zentrum.de