
SiNafaR - Sichere Navigation für autonome Robotikplattformen
09.08.2010
Einer zivilen Nutzung autonomer mobile Roboter stehen bisher oft sicherheitstechnische Aspekte im Weg. Können diese jedoch erfüllt werden, ergeben sich neue Chancen der Vermarktung in einem sehr großen Umfang.
Detaillierter Projektinhalt
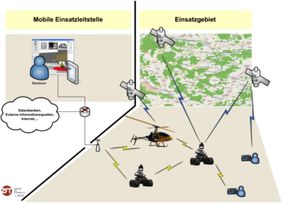
Um die Anforderungen in speziellen Anwendungsszenarien erfüllen zu können gibt es auf der technologischen Seite Entwicklungsbedarf. So ist es notwendig, eine robuste und zuverlässige integrierte Navigation und Kommunikation bereitstellen zu können, die jederzeit einen sicheren Betrieb des Roboters erlaubt. Um die Nutzung für die potentiellen Anwender zu ermöglichen, sind entsprechende Mensch-Maschine-Schnittstellen zu entwickeln, die einen einfachen und fehlerfreien Betrieb erlauben. In SiNafaR werden hierfür die notwendigen Methoden und Verfahren realisiert, um den Einsatz kooperierender Luft- und Bodenroboter in zivilen Anwendungen zu ermöglichen.
Projektpartner
- Fraunhofer IIS, Erlangen
- Zentrum für Telematik e.V.
- Lehrstuhl für Informatik 7 – Robotik und Telematik, Universität Würzburg
- EADS Deutschland GmbH
- Wilkon e.K.
Förderung
Dieses Projekt wird durch das Bayerische Staatsministerium für Wirtschaft, Infrastruktur, Verkehr und Technologie gefördert.
Kontakt
Für weiterführende Informationen kontaktieren Sie uns unter: 
Publikationen (einblenden)
O. Kurz, M. Stahl, D. Aschenbrenner, M. Fritscher, R. Hess, K. Schilling
Coordinates Magazine Volume X Issue (OM)
Delhi, India (2014)
Michael Fritscher, Robin Heß, Klaus Schilling
ROSCON2013 (ROSCON)
Stuttgart, Germany (2013)
Michael Fritscher, Robin Heß, Klaus Schilling
Workshop “Robot Software Architectures” during the ICRA2013 (icra_sdir-VIII2013) (ICRA)
Karlsruhe, Germany (2013)
Magdalene-Schoch-Str. 5
97074 Würzburg - Germany
Daniel Eck (Geschäftsführer)
Telefon: +49 (0)931 615 633-10
Fax: +49 (0)931 615 633-11
E-Mail: info(at)telematik-zentrum.de