
Robotic Test Environment

Development of robotics applications
Increased efficiency and cost savings through automation are an increasingly important topic for all companies that want to make their production more efficient and make them future-proof. Before implementing an automation solution with robots, however, feasibility must first be feasibility, as well as the effort, costs and the achievable increase in efficiency be determined.

Robotic test environment at ZFT.
A concrete test setup and testing of the concept in practice can help to test automation processes in advance and evaluate their benefits before costly investments are made. However, robots and other devices are required to realize an initial realistic test setup of the automation station, which are not available to many potential users.
The Center for Telematics (ZfT) provides the right intermediate step between concept and practical implementation. In the ZfT’s I4.0 demonstrator hall, a large number of different industrial robots and collaborative manipulators (CoBots) are available for testing automation concepts. All robots have extensive additional equipment - from grippers, cameras and other sensors to the industrial workstation environment - with which a wide variety of automation applications can be demonstrated and tested in practice.
In addition to initial test setups, the ZfT can also take on the complete development, programming and implementation of robot-based automation solutions. We already have expertise in a wide range of robot applications, from force-sensitive workpiece processing such as milling or polishing, workpiece handling and integration through to material transport. The ZfT sees itself as a developer of special solutions (possibly also with a research character) that cannot be covered by traditional system integrators.
Available robots
The ZfT has various robot models with different ranges and payloads. These can be used to test and implement both classic industrial robot applications and collaborative CoBot applications.
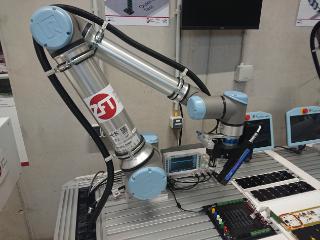
Universal Robots Ur10e
Flexible 6-axis CoBot for a variety of applications
- Type: CoBot
- Reach: 1300 mm
- Payload: 12.5 kg
- Available quantity: 3
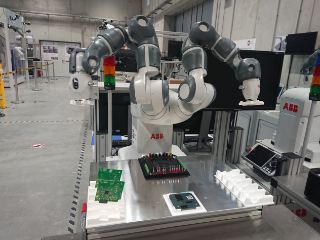
ABB Yumi
2-arm, 7-axis CoBot for precise handling of sensitive components.
- Type: Collaborative Lightweight Robot
- Reach: 2 x 559 mm
- Payload: 2 x 0.5 kg
- Available quantity: 3

KUKA KR16 arc HW
Classic industrial robot for industrial applications.
- Type: Industrial Robot
- Reach: 1636 mm
- Payload: 16 kg
- Available quantity: 1

KUKA LBR iisy
Compact CoBot for larger payloads.
- Type: CoBot
- Reach: 930 mm
- Payload: 15 kg
- Available quantity: 1
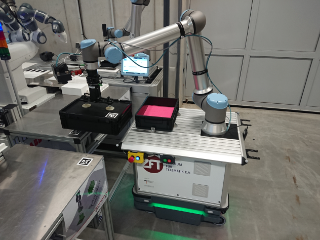
UR10e with Mobile MIR Platform
Mobile manipulator for autonomous component handling and transport.
- Type: Mobile Manipulator
- Reach: Free navigation in process environment; Arm 1300 mm
- Payload: 12.5 kg
- Available quantity: 2
We also have experience with systems from other robot manufacturers (e.g. Fanuc, Reis Robotics).
Various grippers (two-finger, heavy-duty, vacuum) are available for all robots, as well as various cameras and sensors for precise 3D detection of workpieces or the working environment.
Anwendungsvideos
Automated solar panel production
Distortion during cooling leads to positional deviations with varying tolerances on the individual components of cast steel workpieces. In order to enable automated deburring with a position-controlled robot, a projection-based interface is used here, which makes it possible to intuitively visualize the programmed processing paths directly on the workpiece. Deviations can be quickly detected and corrected in this way. In addition, the interface can also be used to easily teach new machining paths directly on the component using a tracked input pen.
Automated deburring of cast steel
In the automated production of solar panels, the highest demands must be placed on precision and repeat accuracy in order to achieve a consistently high processing result. In the realized application, various robots from different manufacturers work together to carry out the necessary production and testing steps. For example, the application of adhesive, sub-millimetre-precise placement of the solar cells, pressing with even pressure and soldering of the contacts are all carried out fully automatically, which not only increases production quality but also leads to a higher production speed.
Robotics solutions
Potential users can contact the ZfT with their enquiry. These can be basic tests with robots, special automation solutions or research applications. After a free consultation and estimation of the effort involved, further implementation steps can be taken.
Services
The ZfT offers the opportunity to evaluate applications with industrial robots in its I4.0 demonstrator hall. On the one hand, it is possible to test the basic feasibility of the planned automation solution by implementing and testing essential process steps on a basic test setup with one of the ZfT’s robots. If the results are satisfactory, the complete further development and finalisation of the robot-based automation task by ZfT experts is also possible.
Contact
For enquiries about the robot test environment or the development of robotics applications, please contact: 
Magdalene-Schoch-Str. 5
97074 Würzburg - Germany
Telefon: +49 (0)931 615 633-10
Fax: +49 (0)931 615 633-11
E-Mail: info(at)telematik-zentrum.de