

Autonomous Navigation
Factories in the age of Industry 4.0 require flexible and freely navigating transport systems. Dreams of the future? We set the tone!
3D environment survey
The acquisition of accurate environmental information by sensors and data fusion provides the basis for decisions of autonomous mobile systems. We help robots to see and understand the world.

Autonomous robot networks of drones, ground systems and humans
Complex tasks require the coordination and cooperation of autonomous robots of different types. We enable efficient cooperation in human-robot teams.
Mobile Systems
Mobility currently has enormous innovation potential thanks to advances in digitization, networking, sensor technology for characterizing the environment and autonomous reaction capabilities. Vehicles that can move independently and with high reliability on factory floors and in road traffic are thus becoming reality ever more quickly on the basis of modern digitisation technology (especially in telecommunications, electronics, control technology and data processing).
Mobile robots on the ground, in the air and in water are thus always offering applications in industry, business, the security sector and private households. Autonomous and tele-assisted transport robots can perform tasks in unsafe, dangerous or monotonous environments, but also increase productivity in dynamic production environments, thus opening up new application areas in the private, security, commercial and industrial sectors.
In order to further develop this vision of future mobility, the Zentrum für Telematik has been working on the application of telematics methods in the field of mobile robots since its foundation. Technologies for autonomous, networked and cooperating mobile systems have been developed and used to solve tasks in concrete applications.
Numerous project examples, which have been carried out in EU, BMWi, BMBF and industrial direct projects, are presented on the following pages and should give you ideas, which tailor-made mobile solutions the Zentrum für Telematik can develop for your problems.
Topics

Projects

DroneResponseNet: Situation reconnaissance through automated drone deployment from the centralized control center
The assessment of operational situations is crucial for control centres of authorities and organizations with security tasks (BOS) in terms of time and across organizations in order to deploy emergency personnel in a quantitative and qualitative manner appropriate to the situation. As drones can cover an extensive area in a short space of time, they have great potential for this. DroneResponseNet therefore wants to develop a control center-supported drone system that creates added value.
Read more
AutoDok Autonome Unfalldokumentation
The AutoDok research project is developing a fully integrated, drone-based solution for police documentation and the preservation of evidence in complex major incidents, such as serious traffic accidents. The use of drones enables autonomous, comprehensive, secure and significantly faster recording. The system, which is integrated into a special emergency vehicle, covers the entire process of transportation, flight planning and monitoring as well as simultaneous 3D model creation and generation of georeferenced, true-to-scale photos.
Read more
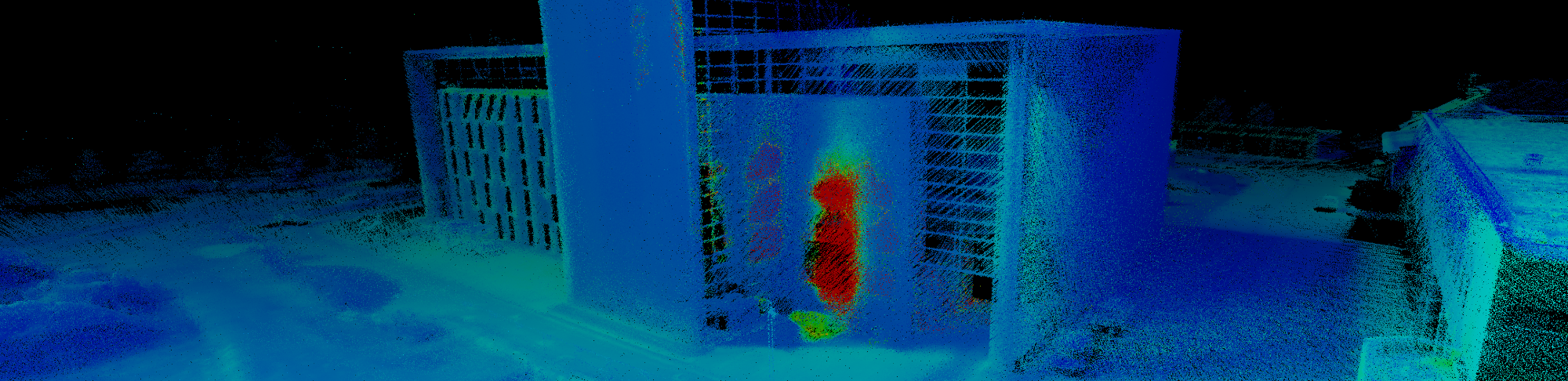
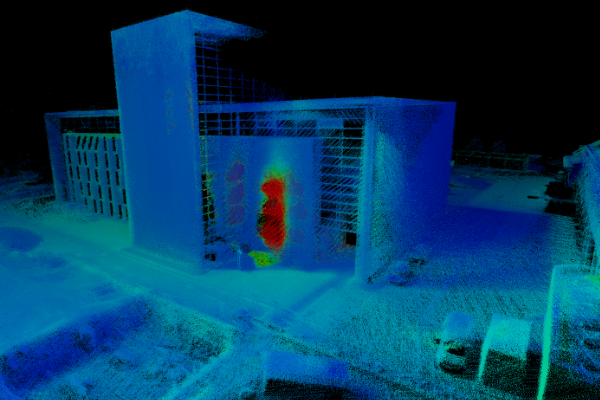
DEALS3D: 3D Monument Protection
In the DEALS3D project, a technical solution is being developed to create accurate three-dimensional models of culturally relevant buildings. In order to capture all required perspectives, images are generated and automatically fused by ground-based 3D sensors and by sensors carried by unmanned flight systems.
Read more
Eins3D - Airborne environmental reconnaissance in 3D
In the event of major emergencies such as major fires, mass pile-ups or large-scale flooding, it is difficult for the emergency services to obtain an overview of the situation on site. In addition, changes in the damage situation can usually only be registered with a time delay, which makes it considerably more difficult to manage the emergency services effectively.
Read more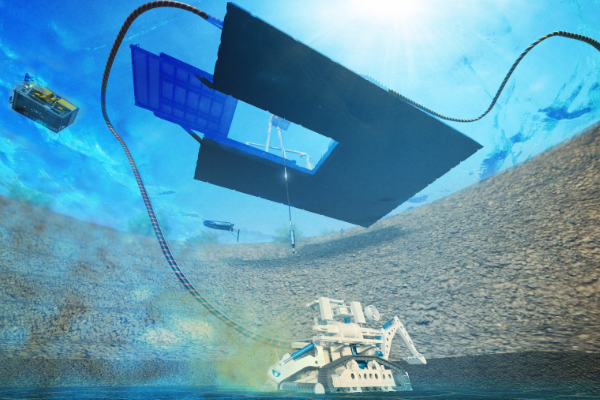
¡VAMOS!
The aim of the project ¡VAMOS! (Viable Alternative Mine Operating System) is the development and construction of an underwater robot for the mining of minerals in flooded open-cast mines.
Read more
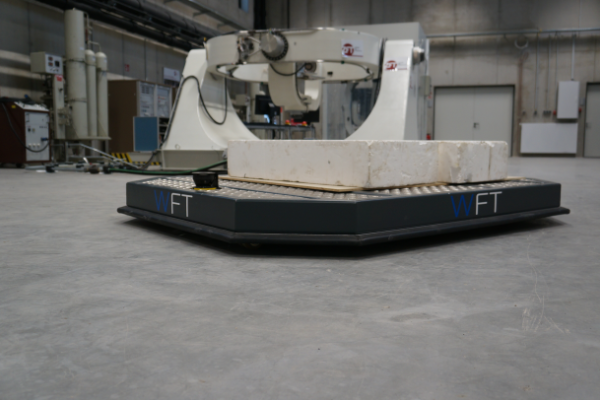
LiBeRo: Line Coating Robot
The line coating robot is a system for the automated, precise application of line markings on different floors. Application examples are markings in factory halls, swimming pool floors or roadways.
Read more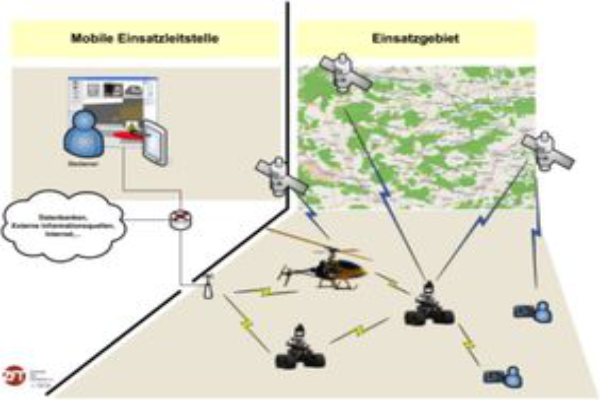
SiNafaR - Safe Navigation for Autonomous Robotic Platforms
Until now, safety aspects have often stood in the way of civil use of autonomous mobile robots. However, if these can be met, new opportunities for marketing on a very large scale will arise.
Read moreMagdalene-Schoch-Str. 5
97074 Würzburg - Germany
Daniel Eck (Geschäftsführer)
Telefon: +49 (0)931 615 633-10
Fax: +49 (0)931 615 633-11
E-Mail: info(at)telematik-zentrum.de